L’OR2 vedrà lo sviluppo di sistemi e metodologie finalizzate alla prototipazione di dispositivi di percezione e comunicazione terrestri e aerei. In particolare, si prevede lo sviluppo della piattaforma Rover-Unmanned Ground Vehicle (UGV) e Drone–Unmanned Aerial Vehicle (UAV).
PRINCIPALI ATTIVITÀ
Sviluppo di piattaforme multisensoriali
Questa parte della ricerca si focalizzerà sull’identificazione e sviluppo di piattaforme multisensoriali progettate secondo criteri di interoperabilità, modularità e scalabilità, da integrare a bordo dei sistemi UGV e UAV. Saranno valutati sensori qualicamere RGB, camere multispettrali e iperspettrali, camere termiche e LIDAR, che da un lato forniranno informazioni utili ai compiti di navigazione dei veicoli, dall’altro permetteranno un monitoraggio automatico e continuo delle colture a supporto dell’agricoltura di precisione.
Piattaforme robotiche UGV
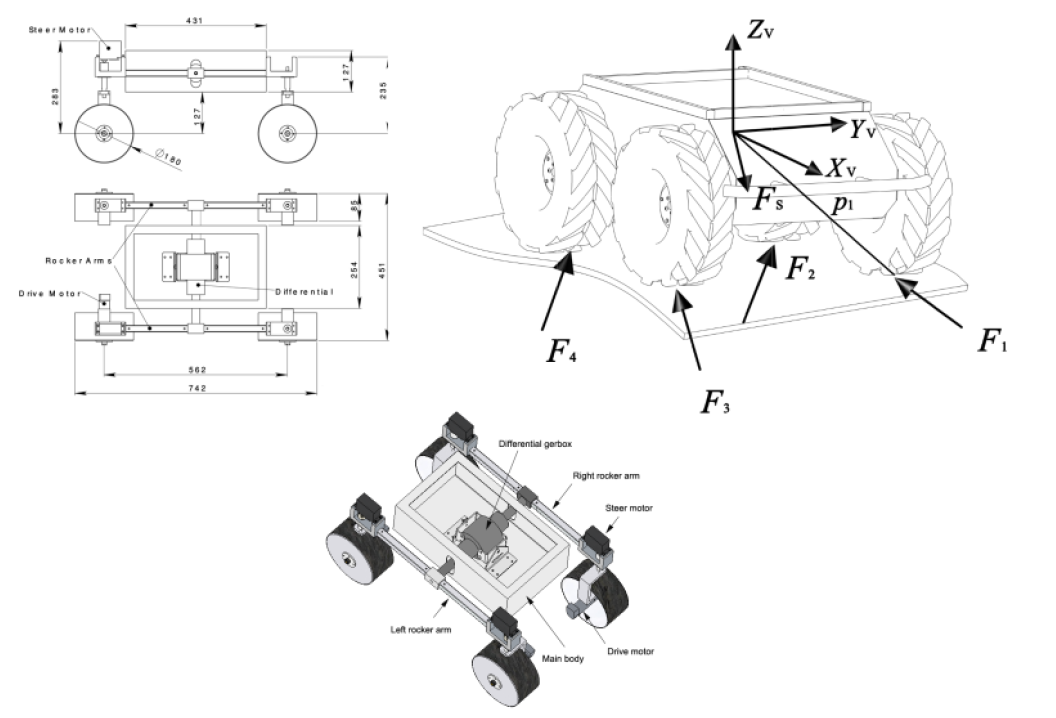
Il veicolo terrestre consisterà in un rover di tipo unmanned, in grado di navigare su terreni non strutturati. Si affronteranno problemi legati al setup ed alla configurazione dei sensori quali calibrazione, sincronizzazione e comunicazione dati. Tutte le funzionalità di percezione e navigazione saranno validate attraverso test dedicati dapprima in laboratorio in ambiente controllato e successivamente attraverso apposite campagne test da eseguire in campo.
Piattaforme robotiche UAV
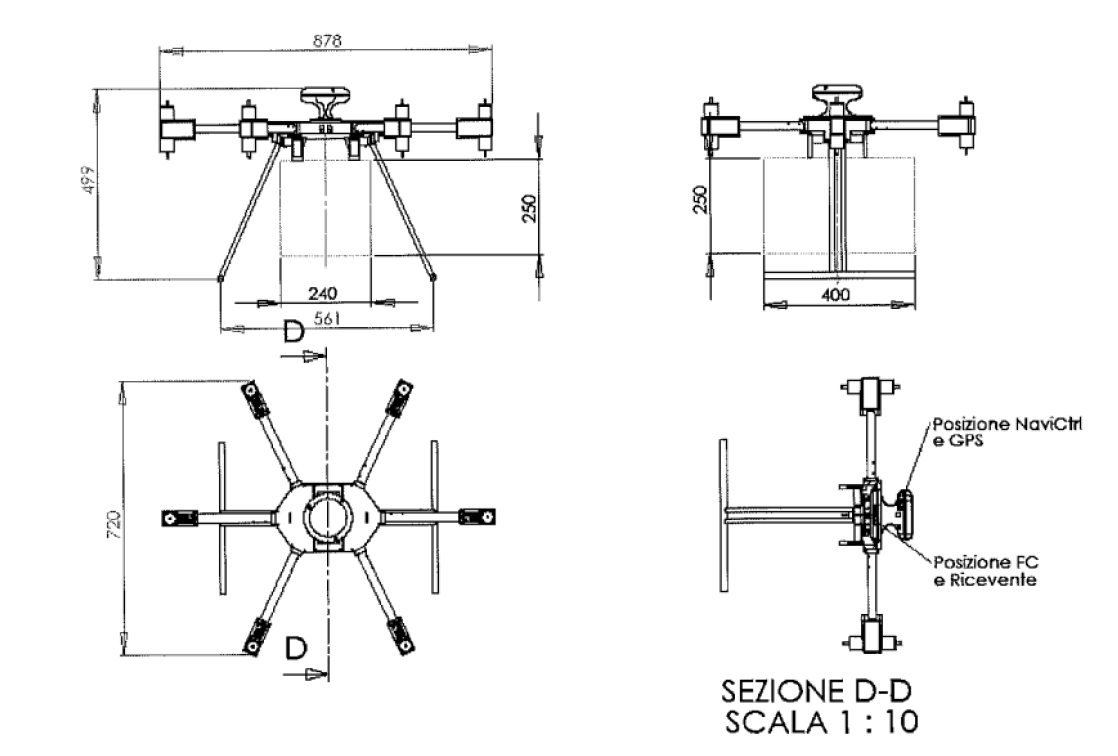
I veicoli UAV verranno selezionati e ottimizzati rispetto agli aspetti relativi all’integrazione e al testing delle componenti hardware e software: sensori, risorse di calcolo, dispositivi per la guida, navigazione (FCS, autopilota) e comunicazione con l’infrastruttura di terra, in funzione delle esigenze delle differenti applicazioni di agricoltura di precisione.
Sistemi di localizzazione e navigazione per UGV
Verranno sviluppati algoritmi di elaborazione dei dati acquisiti dai sensori di bordo, finalizzati ad aumentare il grado di automazione della guida di UGV e ad interpretare in maniera accurata l’ambiente di lavoro, generando una rappresentazione multi-modale dell’ambiente ed in particolare di colture e terreni attraversati
Metodologie per la pianificazione automatica delle missioni e la navigazione UAV
Obiettivo di questa attività è la pianificazione automatica della missione di volo dell’UAV, di norma effettuata a priori grazie al recepimento di informazioni contestuali (orografia, meteo, caratteristiche di velivolo e sensori). Verranno valutate anche metodologie di pianificazione dinamica durante la fase di volo, e strategie di pianificazione della missione accoppiata tra UGV e UAV.
Schema UGV
Schema UAV
We use cookies to ensure that we give you the best experience on our website. If you continue to use this site we will assume that you are happy with it.Ok